- Distortion Calibration Charts
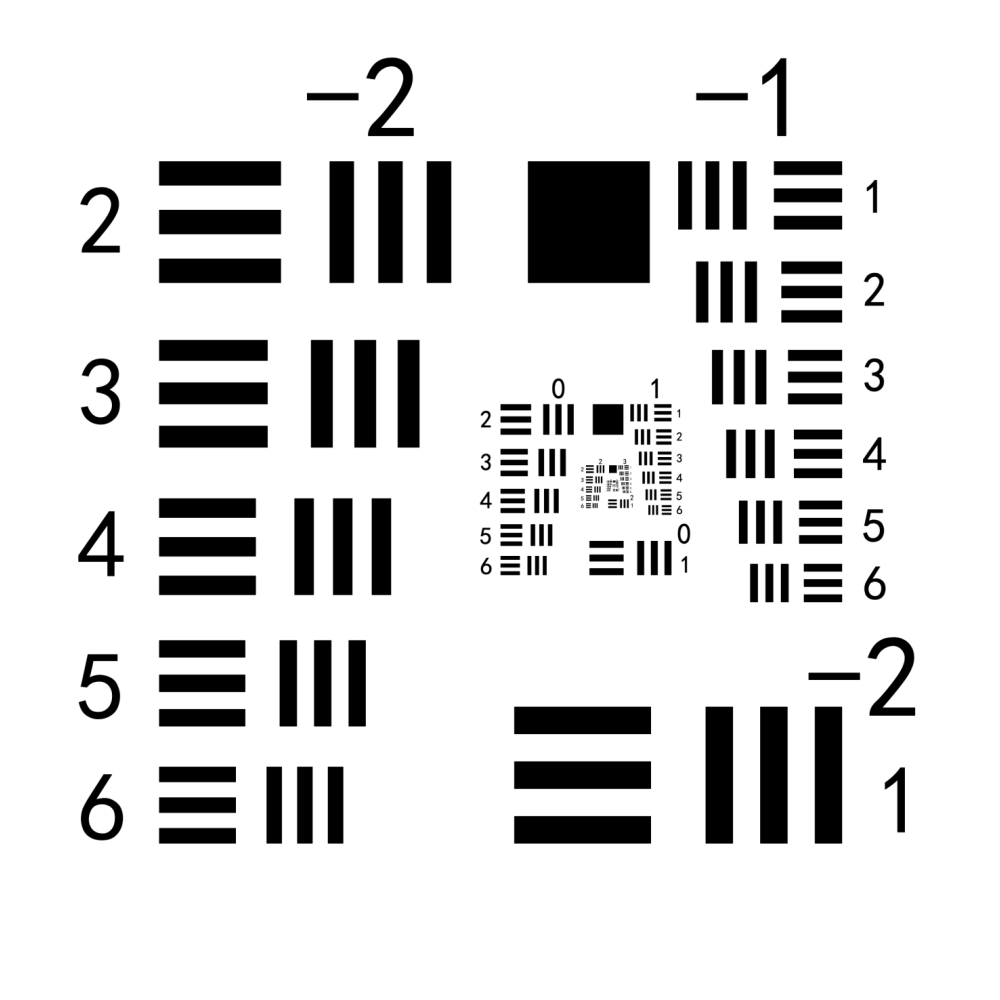
USAF1951 Test Target
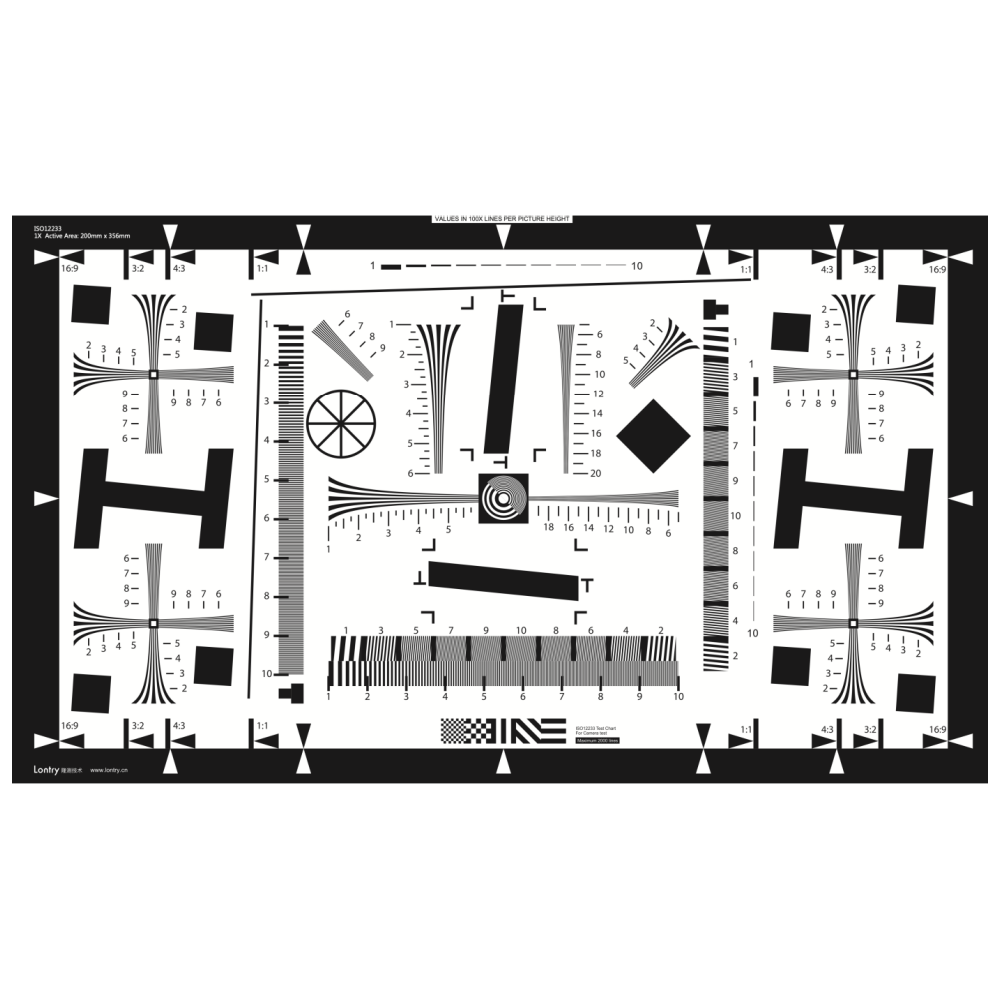
ISO12233 Test Target
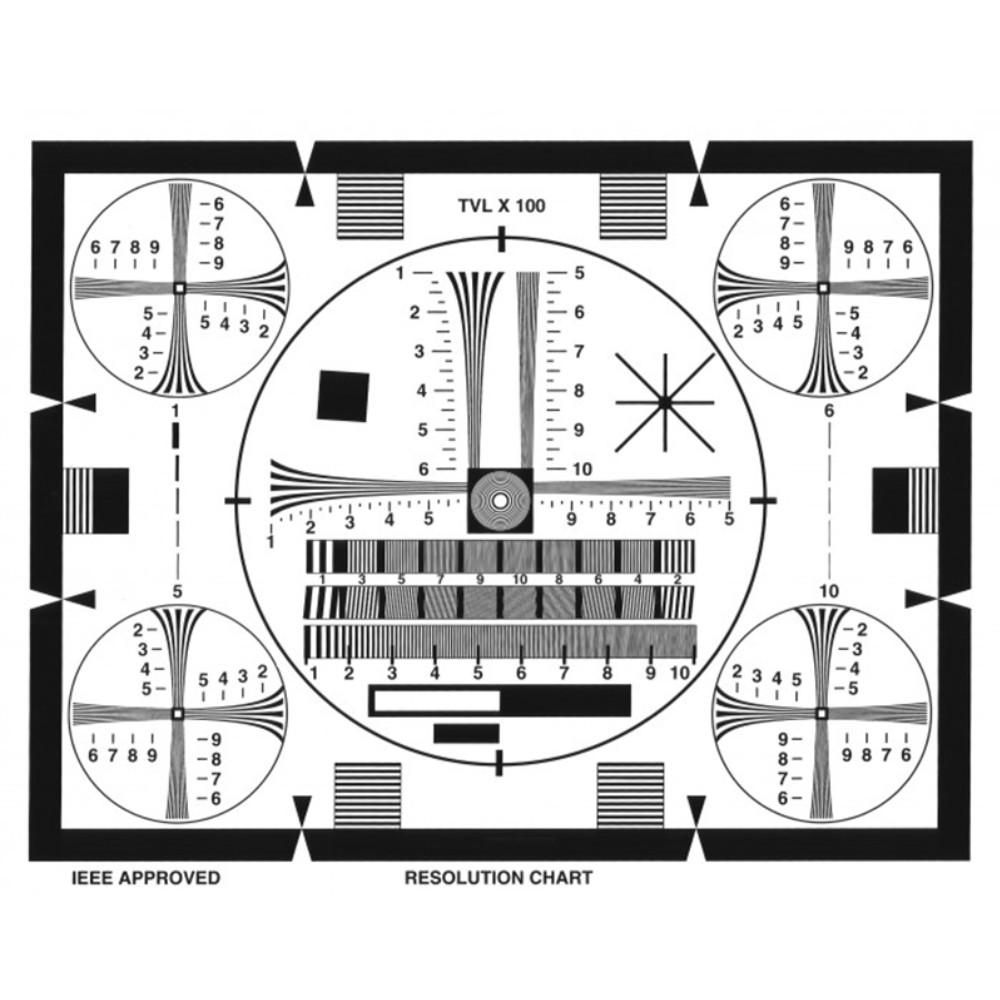
IEEE Test Target
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
Halcon Circle/Dot Pattern
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
Kalibr/AprilGrid
Kalibr/AprilGrid
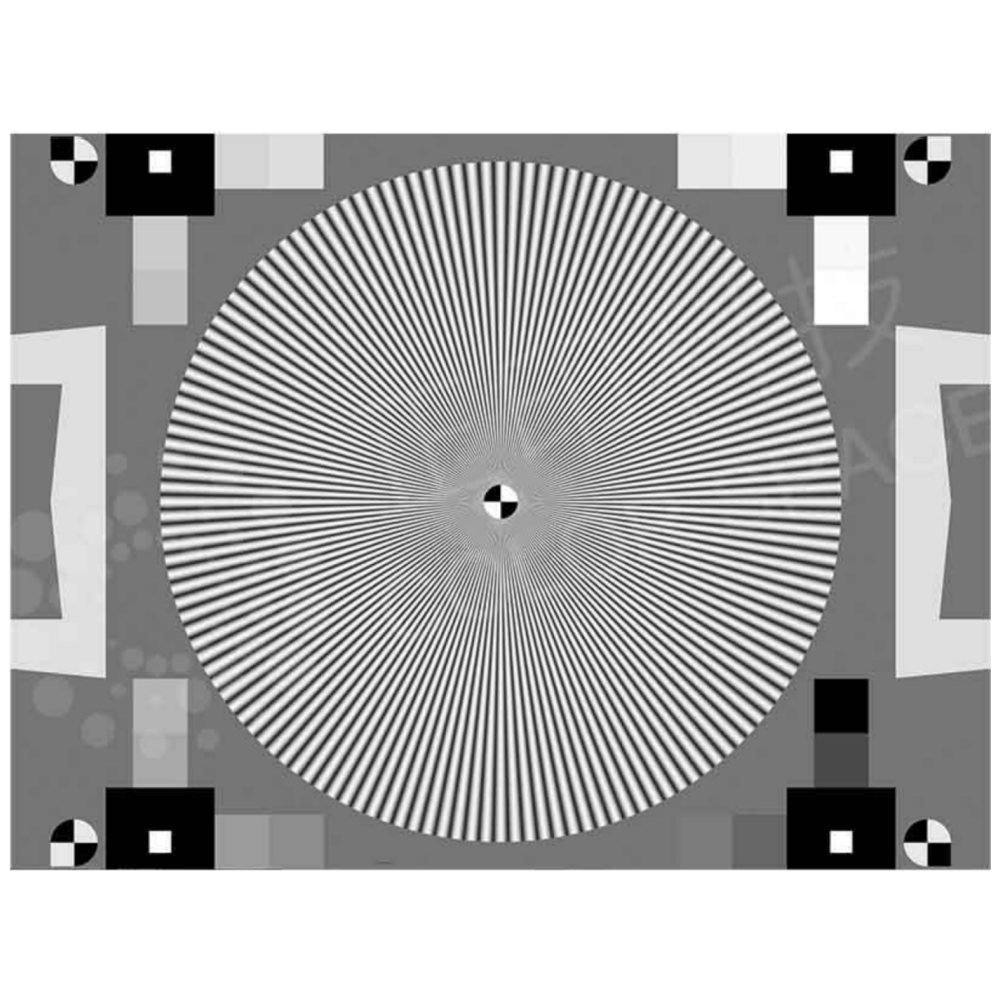
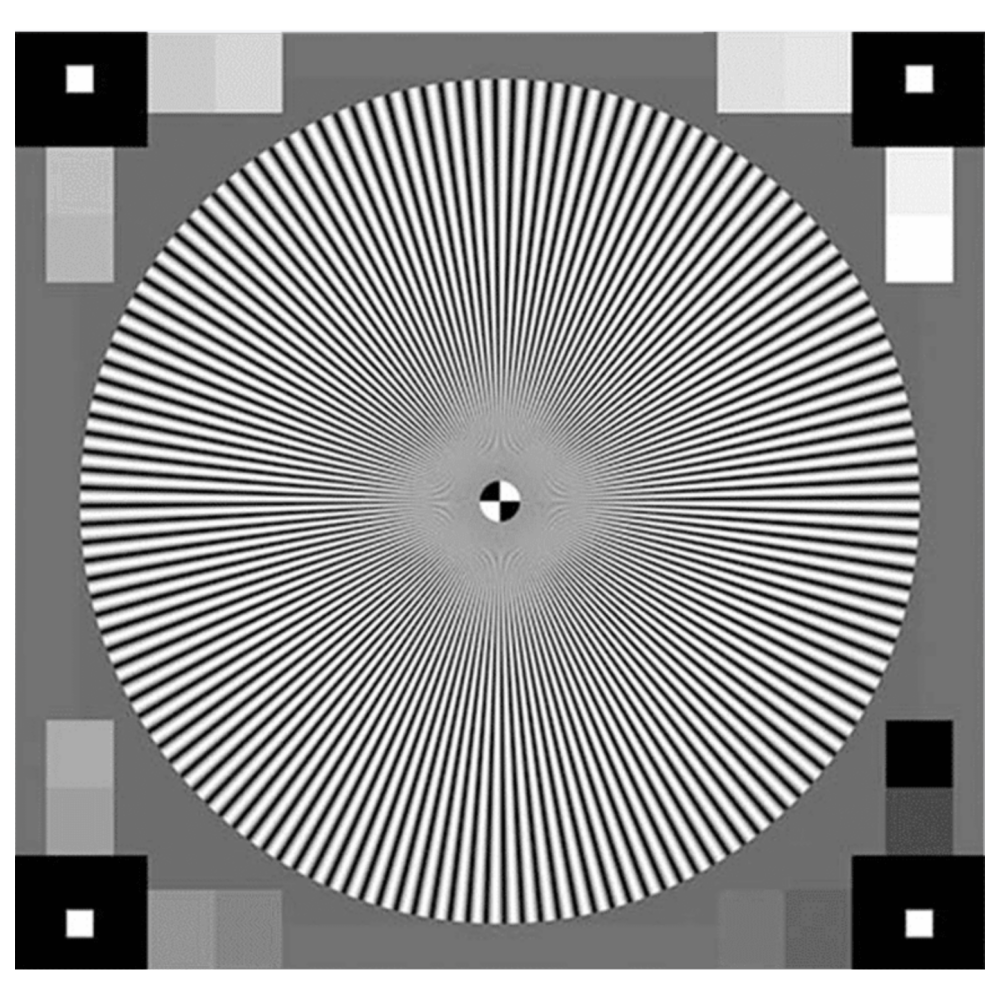
SFR Test Targets
Ronchi Ruling Test Targets
- Distortion Calibration Charts
ChArUco
Kalibr/AprilGrid
Checkboard OpenCV
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
Halcon Circle/Dot Pattern
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
Concentric Circles/Squares
- Distortion Calibration Charts
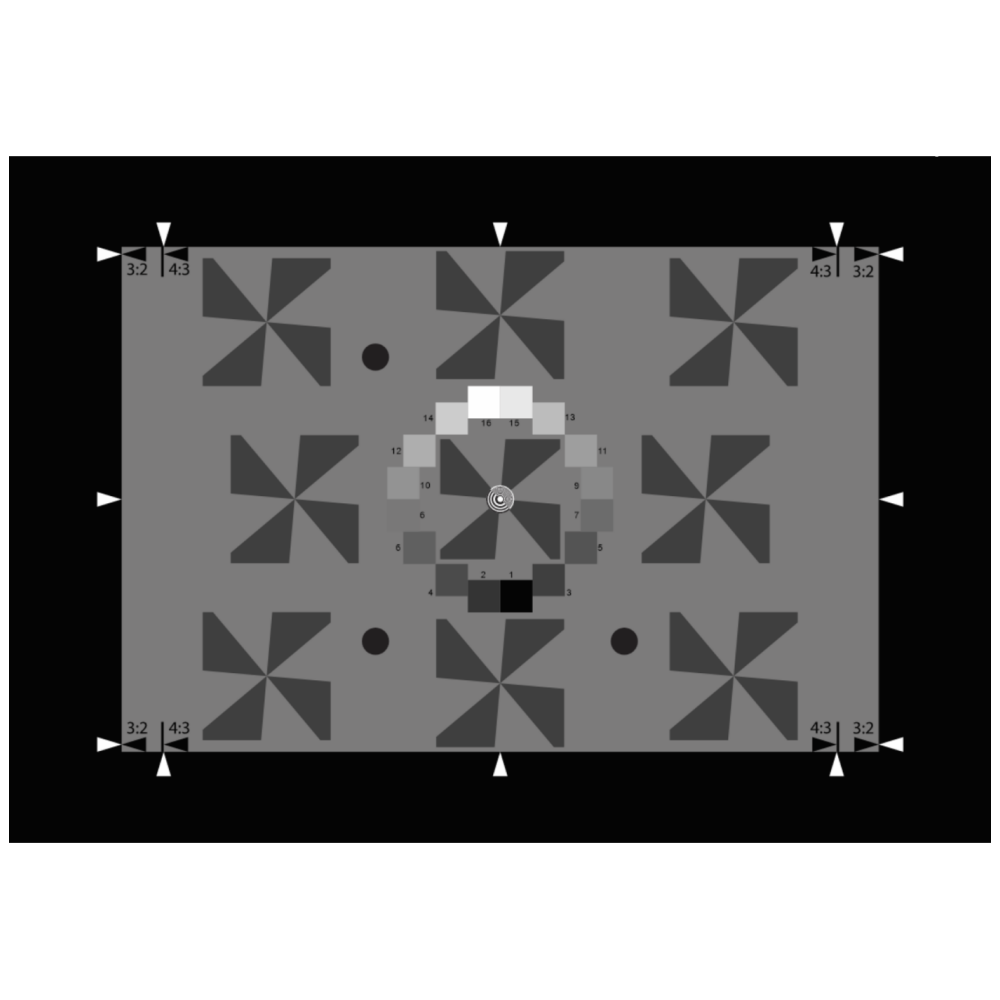
DOF Test Chart
Gray Scale
Gray Reflectance
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
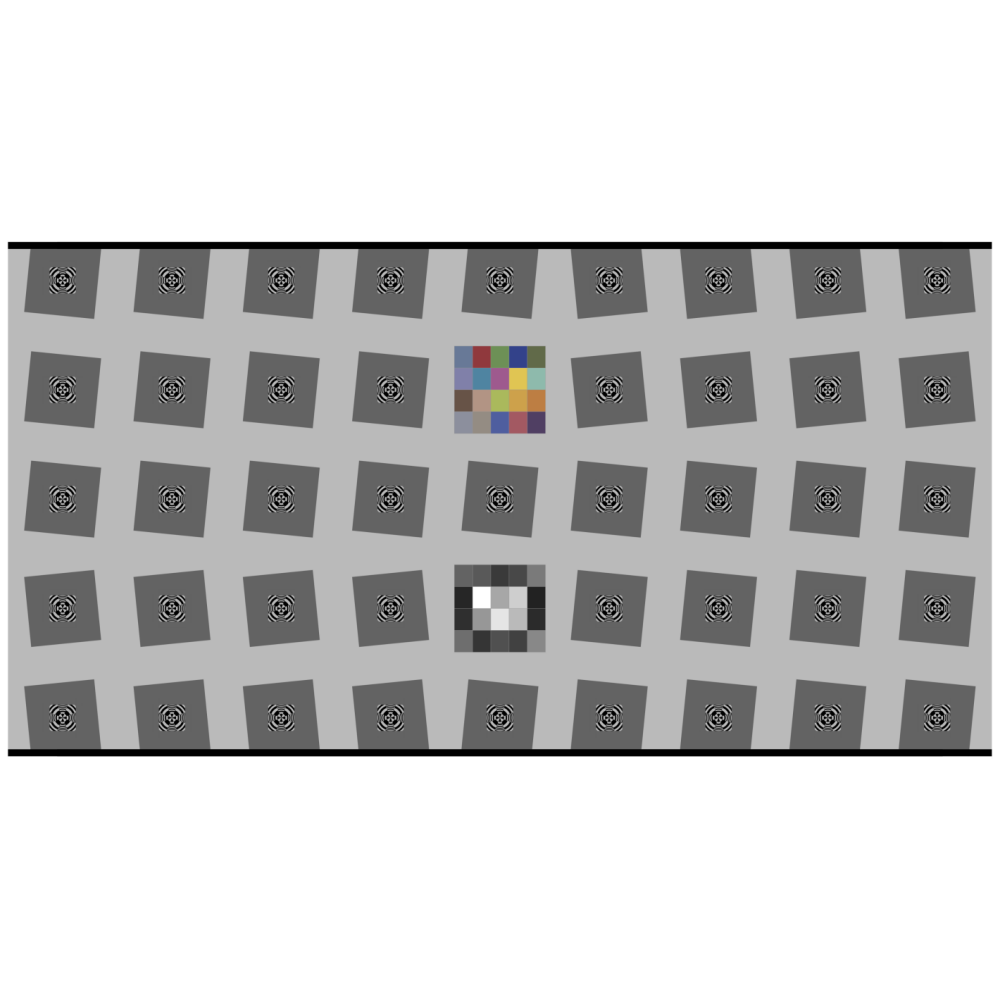
24-Color Standard Chart
Utilizes correspondence between geometric centers of circles and 3D world coordinates to solve camera intrinsic, extrinsic, and distortion parameters. More suitable for high-precision positioning scenarios compared to checkerboards. Commonly used for semiconductor wafer inspection camera calibration, distortion correction in microscopy imaging systems, and joint calibration of LiDAR and cameras in autonomous driving.
Concentric Circle Reticle
| Model | Material | Coating Type | Over size | Target Type | Thickness | Pattern |
|---|---|---|---|---|---|---|
| LTU-025-(0-9,1)-PG | Quartz Glass | Blue Chrome | 25 x 25mm 1" x 1'' | Positive | 1.6mm | Group 0 Element1 to Group 9 Element 1 |
| LTU-025-(0-9,1)-NG | Quartz Glass | Blue Chrome | 25 x 25mm 1" x 1'' | Negative | 1.6mm | Group 0 Element1 to Group 9 Element 1 |
| LTU-025-(0-9,6)-PG | Quartz Glass | Blue Chrome | 25 x 25mm 1" x 1'' | Positive | 1.6mm | Group 0 Element 1 to Group 9 Element 6 |
| LTU-025-(0-9,6)-PG | Quartz Glass | Blue Chrome | 25 x 25mm 1" x 1'' | Negative | 1.6mm | Group 0 Element 1 to Group 9 Element 6 |
| LTU-050-(0-9,1)-PG | Quartz Glass | Blue Chrome | 50 x 50mm 2" x 2'' | Positive | 1.6mm | Group 0 Element1 to Group 9 Element 1 |
| LTU-050-(0-9,1)-PG | Quartz Glass | Blue Chrome | 50 x 50mm 2" x 2'' | Negative | 1.6mm | Group 0 Element1 to Group 9 Element 1 |
| LTU-050-(0-9,6)-PG | Quartz Glass | Blue Chrome | 50 x 50mm 2" x 2'' | Positive | 1.6mm | Group 0 Element1 to Group 9 Element 6 |
| LTU-050-(0-9,6)-PG | Quartz Glass | Blue Chrome | 50 x 50mm 2" x 2'' | Negative | 1.6mm | Group 0 Element1 to Group 9 Element 6 |
| LTU-076-(-2-9,1)-PG | Quartz Glass | Blue Chrome | 76 x 76mm 3" x 3'' | Positive | 1.6mm | Group -2 Element1 to Group 9 Element 1 |
| LTU-076-(-2-9,1)-PG | Quartz Glass | Blue Chrome | 76 x 76mm 3" x 3'' | Negative | 1.6mm | Group -2 Element1 to Group 9 Element 1 |
| LTU-076-(-2-9,6)-PG | Quartz Glass | Blue Chrome | 76 x 76mm 3" x 3'' | Positive | 1.6mm | Group -2 Element1 to Group 9 Element 6 |
| LTU-076-(-2-9,6)-PG | Quartz Glass | Blue Chrome | 76 x 76mm 3" x 3'' | Negative | 1.6mm | Group -2 Element1 to Group 9 Element 6 |
| Model NO. | Substrate Material | Coating Type | Overall Target Size | Active Pattern Area | Checkerboard Pattern | Array | Feature Accuracy | Add to Cart |
|---|---|---|---|---|---|---|---|---|
| LTO-030-2.0-G | Soda Lime Glass | Brown Chrome |
30 x 30mm 1.2‘’ x 1.2'' |
26 x 24mm 1.0'' x 0.94'' |
2.0 x 2.0mm | 13 x 12 | 1μm | |
| LTO-045-3.0-G | Soda Lime Glass | Brown Chrome |
45 x 45mm 1.8‘’ x 1.8'' |
39 x 36mm 1.5'' x 1.4'' |
3.0 x 3.0mm | 13 x 12 | 1μm | |
| LTO-060-4.0-G | Soda Lime Glass | Brown Chrome |
60 x 60mm 2.4‘’ x 2.4'' |
52 x 48mm 2.0'' x 1.9'' |
4.0 x 4.0mm | 13 x 12 | 1μm | |
| LTO-76-5.0-G | Soda Lime Glass | Brown Chrome |
76 x 70mm 3.0‘’ x 2.8'' |
65 x 60mm 2.6'' x 2.4'' |
5.0 x 5.0mm | 13 x 12 | 1μm | |
| LTO-88-6.0-G | Soda Lime Glass | Brown Chrome |
88 x 88mm 3.5‘’ x 3.5'' |
78 x 72mm 3.1'' x 2.8'' |
6.0 x 6.0mm | 13 x 12 | 1μm | |
| LTO-111-8.0-G | Soda Lime Glass | Brown Chrome |
111 x 106mm 4.4‘’ x 4.2'' |
104 x 96mm 4.1'' x 3.8'' |
8.0 x 8.0mm | 13 x 12 | 1μm |